CS91 Computer Animation: Lab 6
In this assignment, you will implement transformations and forward kinematics. The features you implement in this assignment will lay the groundwork for working with motion capture and character animation. Specifically, after completing this assignment, you will be able to load a BVH motion capture file and play back the animation on a character.
Step 1: Get the source
The forward kinematics assignment has been added to your team's AnimationFramework reporitoy. To get the source, run
> git pullIt appears that Swarthmore github may be down during our lab today. To work around this problem, I've posted the assignment here. Download it to your AnimationFramework directory. Then,
> gunzip fk-assignment.tar.gz > tar xvf fk-assignment.tarThe tar file will replace several files in your repository which you can check in later.
Step 2: Compile and run
Same as before, you should compile all source in a build subdirectory. The compiled applications will be in /bin as with the rotation assignment. Additionally, the asisgnment includes 'solution' versions of the assignment libraries which you can use to build a 'solution' version of the demo.
> rm -rf build > mkdir build > cd build > make > ../bin/FKViewer > ../bin/FKViewer-Soln
User interface overview
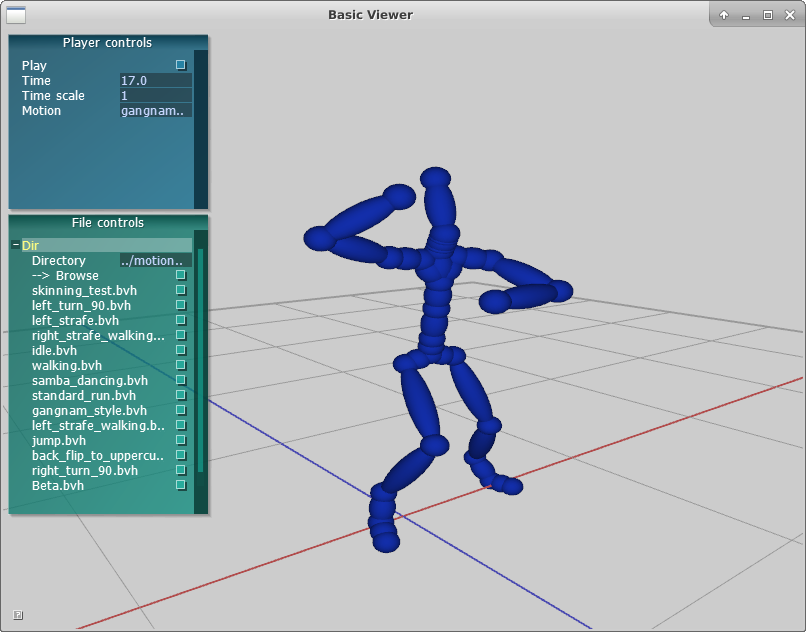
The basecode includes a simple interface and 3D viewer for loading and playing BVH files. See above for a screenshot. By default, we will load a character and several example BVH files.
The camera can be controled with the mouse:
- Left-button drag with the mouse to rotate
- Right-button drag with the mouse to pan
- Middle-button drag with the mouse to zoom
- 'f' button will focus the view on the character
The player control panel on the top left can be used to load and play files. The panel at the bottom left can be used to load different BVH files.
Character animation implementation overview
The basecode includes a framework for organizing transforms into a hierachy and animating them using curves. The core data structure for supporting this functionality is the AnimatableTransform, which maintains pointers to parent and child transforms. The AnimatableTransform primarily contains a Transform which keeps track of its position relative to its parent. It also stores its transform relative to the world coordinate system for convenience.
AnimatableTransforms are arranged into a hierachy with the AnimatableHierarchy class. The root of the AnimatableHierarchy is positioned relative to the world coordinate system whereas all other joints are positioned relative to its parent in the hierachy. Although the AnimatableHierachy could be used to animate any group of transforms, for character animation it is natural to think of the AnimatbleHierachy as an actor and its corresponding AnimatableTransforms as joints.
To support BVH files, we populate an AnimatableHierarchy using the skeleton information from the file. BVH files are located at /AnimationToolkit/motions. A sample file is here.
We then initialize curves based on the BVH file's motion data and store the result in BVHController. In the case of BVH, where joint limbs do not change length, the bvh controller only manages a single translational curve for the root joint. However, the BVHController does manage rotational curves for both the root and every joint. During playback, the BVHController queries the animation curves and then updates the transformations accordingly.
To summarize, the class hiererachy used for this asignment is the following:
BVHController
AnimatableHierarchy (aka Actor)
ASplineVec3 for the root joint position
ASplineQuaternion for each AnimatableTransform (aka Joint).
Assignment Due March 27
Quaternion Slerp
Quaternion splines. The basecode includes a class ASplineQuaternion whose interface mirrors the spline you worked with for vectors in the previous assignment.- (5 points) Implement Quaternion::Slerp() in aRotation.cpp
Input The startpoint quaternion q0
Input The endpoint quaternion q1
Input The normalized time t (range 0,1)
Output The interpolated quaternion
Forward kinematics
- (20 points) Transformations. Complete the implementation of the transformation class. This class stores its rotation \(R_j^i\) and translation \(d_j^i\). You may implement these functions either via homogeneous matrices or direct manipulation of \(R\) and \(d\).
- (5 points) Implement Transform::Inverse()
Output Transform objects representing the inverse of this object. Compute the inverse rotation and inverse displacement and pass the result to a new Transform.
- (5 points) Implement Transform::TransformPoint()
Input 3D position to be transformed by this transform
Output Transformed position
- (5 points) Implement Transform::TransformVector()
Input 3D vector to be transformed by this transform
Output Transformed vector
- (5 points) Implement operator* () for the Transform class. Computes t1 * t2
InputThe first transform t1 in the operation
InputThe second transform t2
OutputThe resulting transform t1 * t2
- (5 points) Implement Transform::Inverse()
- (10 points) Forward kinematics is the process of computing each transform's local2global matrix. When joint rotations change (e.g. when \(R_j^i\) changes), we need to update the transformation matrices \(F_j^0\). This is achieved by starting at the root and recursively walking the kinematic chain to each end effector, e.g.
updateTransforms()
\(\quad R_j^0 = R_{i}^{0} R_j^i\)foreach child in mChildren child->updateTransforms()Note that because we start at the root, we can be sure the parent's transformation matrix \(R_i^0\) has already been computed!- (5 points) Implement AnimatableHierarchy::updateTransforms(). Initiate the walk by calling updateTransformation() on the root joint.
- (5 points) Implement AnimatableTransform::updateTransformation(). Compute mLocal2Global and then call updateTransformation() on the joint's children.
- The character is updated in BVHController::update(double time). This function iterates through each joint of the skeleton and samples the motion curves in BVHController to se the pose for the given time. Once all the local transforms have been updated, we call perform forward kinematics by calling mSkeleton.updateTransforms(), e.g.
for each joint in mSkeleton if the joint is the root pos = mRootMotion.getValue(time) set joint's local translation to pos quaternion = mMotion[jointID].getValue(time) set joint's local rotation to quaternion.GetRotation() // set matrix update the transforms in the skeletonIn BVHController (aBVHController.h), you will find splines for the root position and for the joint rotations.
In the basecode, joints are implemented with the class AnimatableTransform and the skeleton is implemented with the class AnimatableHierarchy (in aAnimatables.h).
Extra challenge
- Implement Quaternion::Squad()
- Implement Quaternion::Intermediate()
- Compare the animation of the teapot using linear versus cubic interpolation. What are the differences? (Note: The keys used for the demo are hard-coded in the RotationViewer constructor.)
"Rotate, teapot, ROTATE!"
Submission Guidelines (5 points)
Submitting your assignmentStudents should submit their code along with a README and videos. The README can be very brief, consisting of
- answers to questions,
- descriptions of what was completed, including extra challenges, and
- how long the assignment took you and what was the hardest part
- Capture the demo window with recordmydesktop --windowid [OpenGLViewerId] demo.ogv
- To get the window id, run xwininfo and selected the homework window .
- Check the recording with mplayer demo.ogv or run firefox demo.ogv
NOTE: If you're running out of space because of big files, try using the /local drive for temporary storage.
About checkins
You will be asked to briefly checkin (less than 1 minute) about your homework assignment. This is not intended to much work. Please don't prepare slides or a voice over for your video. None of these are necessary! Some ideas of what you might like to talk about:
- Give your name (at least to start, until everyone gets to know each other)
- Say one interesting thing about your assignment; ideally something unique to your experience. Some ideas
- Did you learn anything (os, programming, tools, etc) while working on the assignment that might be interesting or helpful to the whole class?
- Were there any interesting/surprising bugs that you encountered?
- Describe any extra challenges you completed.
- Did the assignment make you curious about any related topics?